Instrucciones de compensación en el lugar para la serie Focus S
Descripción general
El proceso de compensación en el lugar es un procedimiento de comprobación y mejoramiento de la precisión angular de los escáneres mediante el software SCENE.Nota: La compensación en el lugar (OSC) solo está disponible en los modelos FocusS.
Configuración del lugar de la compensación
Antes de iniciar el proceso de compensación, asegúrese de que el lugar disponga de los siguientes elementos y características:
- Un recinto/zona sin presencia ni movimiento de otras personas.
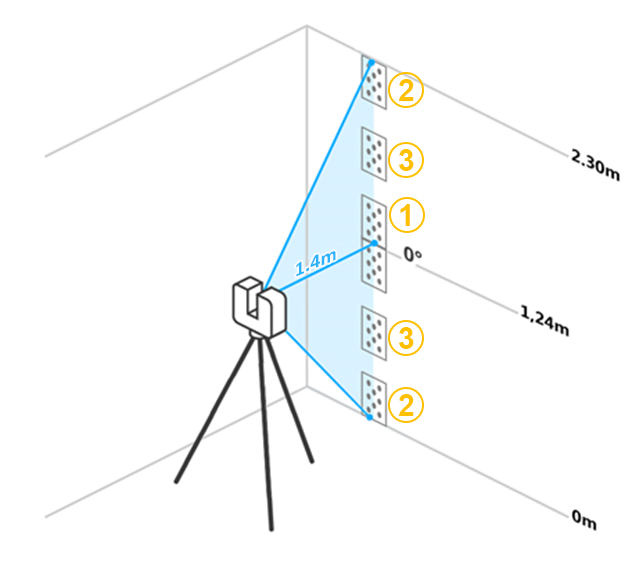
- Hojas de objetivos colocadas a una distancia de los escáneres láser de aproximadamente 1,4 m (4,5 pies).
- Altura mínima del recinto de 2,3 m (7,5 pies).
- Sin ventanas ni otras superficies reflectantes: Los marcadores sobre las hojas de objetivo se reflejarán si el lugar de la compensación tiene alguna ventana o superficie reflectante. Eso podría causar mediciones incorrectas.
- Las condiciones de iluminación son menos importantes debido a que la compensación se realiza con el láser (no se utilizan imágenes de video).
Impresión de hojas de objetivo
Si necesita hojas de objetivos de compensación, puede descargarlas e imprimirlas o bien imprimirlas desde SCENE
- Haga clic en la cinta de exploración.
- Haga clic en Open Target PDF
[abrir PDF de objetivos].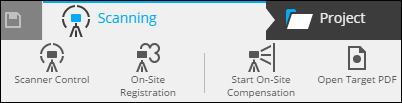
- Imprima al menos seis copias del PDF en papel formato DIN/ISO A4 o formato US Carta.
- Los objetivos se deben imprimir con una impresora láser. No utilice impresoras de chorro de tinta.
- Imprima solo en papel mate estándar; no utilice papel brillante/fotográfico.
- Las impresiones deben ser planas y no tener pliegues ni arrugas, y deben quedar planas una vez fijadas a la pared.
- Le recomendamos que pegue las hojas de objetivo sobre placas rígidas de soporte adecuadas, especialmente si la compensación se realiza en un lugar al aire libre o en un lugar con movimiento de aire.
Colocación del escáner láser y de las hojas de objetivo
- Con el uso del trípode FARO (ACCSS8032), extienda solo las primeras secciones de tubo (las de mayor diámetro) en las 3 patas del trípode.
- La columna central debe estar totalmente retraída (posición más baja). Eso colocará el centro del espejo del escáner a una altura de aproximadamente 1,24 m (4 pies).
- Las patas del trípode deben estar completamente abiertas y estables.
- Coloque el escáner a 1,4 m (4,5 pies) de la pared.
- Asegúrese de que el trípode esté colocado sobre una superficie estable y plana. El trípode no debe moverse durante la exploración.
- Nivele el escáner mediante el inclinómetro incorporado.
|
① Se debe colocar dos "objetivos centrales" simétricamente alrededor del eje horizontal del escáner.
Todas las hojas de objetivo deben estar alineadas verticalmente. Evite personas y objetos en movimiento en la zona mientras realiza la compensación. |
 |
Nota: En el software SCENE 2021.1 y posteriores se ha reducido el ángulo de escaneo de la compensación, lo que permite una compensación más rápida pero se debe tener el cuidado de orientar con precisión el escáner hacia los objetivos. Esta nueva implementación de la compensación solo se puede utilizar con los escáneres FocusS y FocusS Plus con el firmware Focus 6.8 (y posteriores), y SCENE 2021.1 (y posteriores).
Compensación local
Compensar con SCENE según lo indicado en el manual de usuario y ejecutar la exploración ("escaneo") y la corrección.
- En SCENE, conecte la computadora al escáner.
- Haga clic en Start On-Site Compensation [iniciar compensación en el lugar] en la cinta de exploración
- Seleccione una carpeta de salida para almacenar los datos de la compensación.
- Ingrese la dirección IP del escáner láser.
- Para encontrar la dirección IP vaya a Manage > General Settings > WLAN > IP Address [administrar > configuración general > WLAN > dirección IP] en la interfaz de usuario del escáner.
- Haga clic en Connect [conectar].
- Compruebe que los objetivos y el escáner están colocados como se describió anteriormente. Haga clic en Place Targets [colocar objetivos].
- Haga clic en Horizontal Alignment [alineación horizontal].
- Espere a que el escáner deje de girar. Libere el acople rápido y alinee el escáner a fin de que quede paralelo a la pared/objetivos. Una vez alineado, trabe el acople rápido.
- La mejor forma de conseguir la alineación es "mirar" a través del cuerpo del escáner (a la altura del espejo). Desde esta posición los objetivos centrales deben estar a la vista por encima y por debajo del espejo.
- Haga clic en Scan & Compensate [explorar y compensar].
- Una vez finalizada la compensación, se mostrará el informe de compensación, con los resultados de la misma. Haga clic en el botón Abrir informe para abrir el PDF del informe de compensación.
- Los datos del registro se almacenan junto con el informe de compensación. (Unos 300 Mb con todos los datos). La mayoría de los datos son de la exploración. Asegúrese de borrarlo correctamente al comprimir la capacidad del disco
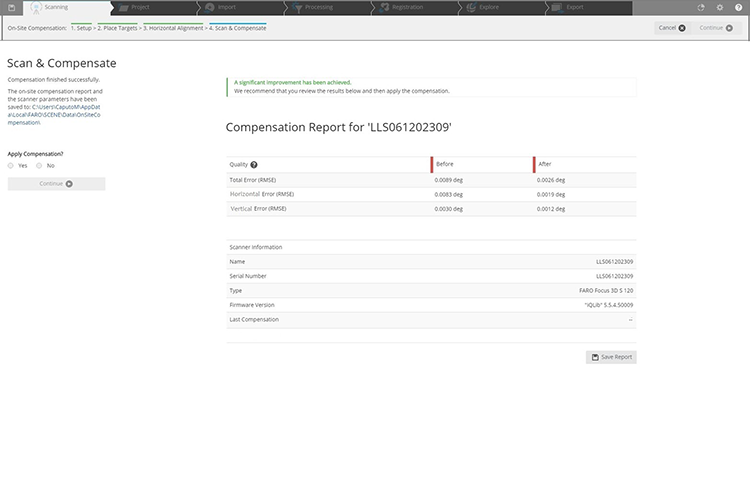
- Elija Sí y haga clic en Finalizar para aplicar esta compensación al escáner. Elija No si no desea aplicar esta compensación.
- A continuación puede desconectarse del escáner.
Resolución de problemas
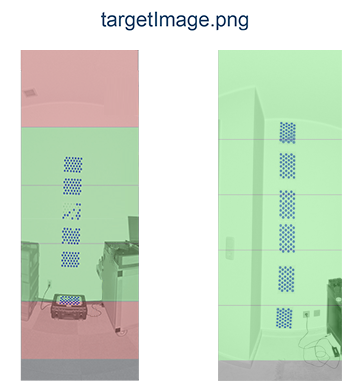
Error: El proceso no identificó suficientes objetivos de compensación.
- Solución: En la carpeta de salida se almacena un archivo de imagen denominado "targetImage.png". La imagen muestra los marcadores detectados en forma de círculos azules. Las zonas con una cantidad suficiente de objetivos detectados se señalan con el color verde de fondo. Las zonas con una cantidad insuficiente de objetivos detectados se señalan con el color rojo de fondo.
Error: Se produjo un error en la lectura y escritura en la carpeta seleccionada de salida de datos.
- Solución: Asegúrese de que usted tenga el permiso de leer y escribir en la carpeta seleccionada. Asegúrese de que haya suficiente espacio en el disco. Se necesitan aproximadamente 330 MB para realizar una compensación en el lugar.
Error: No se pudo determinar una solución coherente.
- Solución: Compruebe que el trípode y los objetivos no fueron movidos durante el procedimiento.
Error: No se pudo tener acceso a la tarjeta SD del escáner.
- Solución: Asegúrese de que la tarjeta SD esté insertada y de que no esté protegida contra escritura, y de que cuente con el suficiente espacio libre (aproximadamente 330 MB).
Error: Se produjo un error en la comunicación con el escáner.
- Solución 1: Asegúrese de que la conexión WLAN con el escáner sea estable. Si se muestra este error al conectarse al escáner, o bien al aplicar los parámetros de compensación, intente repetir el paso correspondiente.
- Solución 2: Con firmware de Focus anteriores a la versión 6.8, y con el uso de versiones de SCENE anteriores a la 2021.1, pudiera ser necesario habilitar el protocolo SMB 1.0. Vaya a Panel de control > Todos los elementos de Panel de control > Programas y características > Activar o desactivar las características de Windows. En la lista que se muestra a continuación busque "SMB 1.0". Marque la casilla y active esta función. Reinicie su computadora.
Palabras clave:
compensación en el lugar, conexión inalámbrica, Wi-Fi, WLAN, objetivo